
From Simulation to Scale: How World Models Will Unlock the Robotics Frontier
For over half a century, robots have been part of industrial and consumer life, from the first automotive assembly arms in the 1960s to Roombas in our homes. Yet, adoption has been slow and linear. Even highly capable robots were limited to narrow, pre-programmed tasks, unable to adapt to new contexts.
Today, we are at an inflection point. The convergence of large-scale AI models, falling hardware costs, and new methods of data acquisition is unlocking a step-change in what robots can do. Reinforcement learning has long been part of robotics training, but the difference now is the rise of pre-trained foundation models that can generalise more effectively across tasks as a baseline. The launch of ChatGPT in 2022 showed the world how rapidly capability can scale when model architecture, compute, and data come together. That same recipe is now being applied to the physical world, not just to process information, but to sense, reason, and act.
Unlike LLMs, robotics will not have a single “ChatGPT moment.” Physical constraints, high upfront costs, and integration complexity mean adoption will happen through a series of distributed ‘Robot Moments’: when a robot first serves you coffee, restocks a store shelf, or folds your laundry. Each moment will mark robotics crossing the chasm into everyday life.
Where Robotics Stands Today
Modern robotics rests on a foundation of several mature enabling technologies:
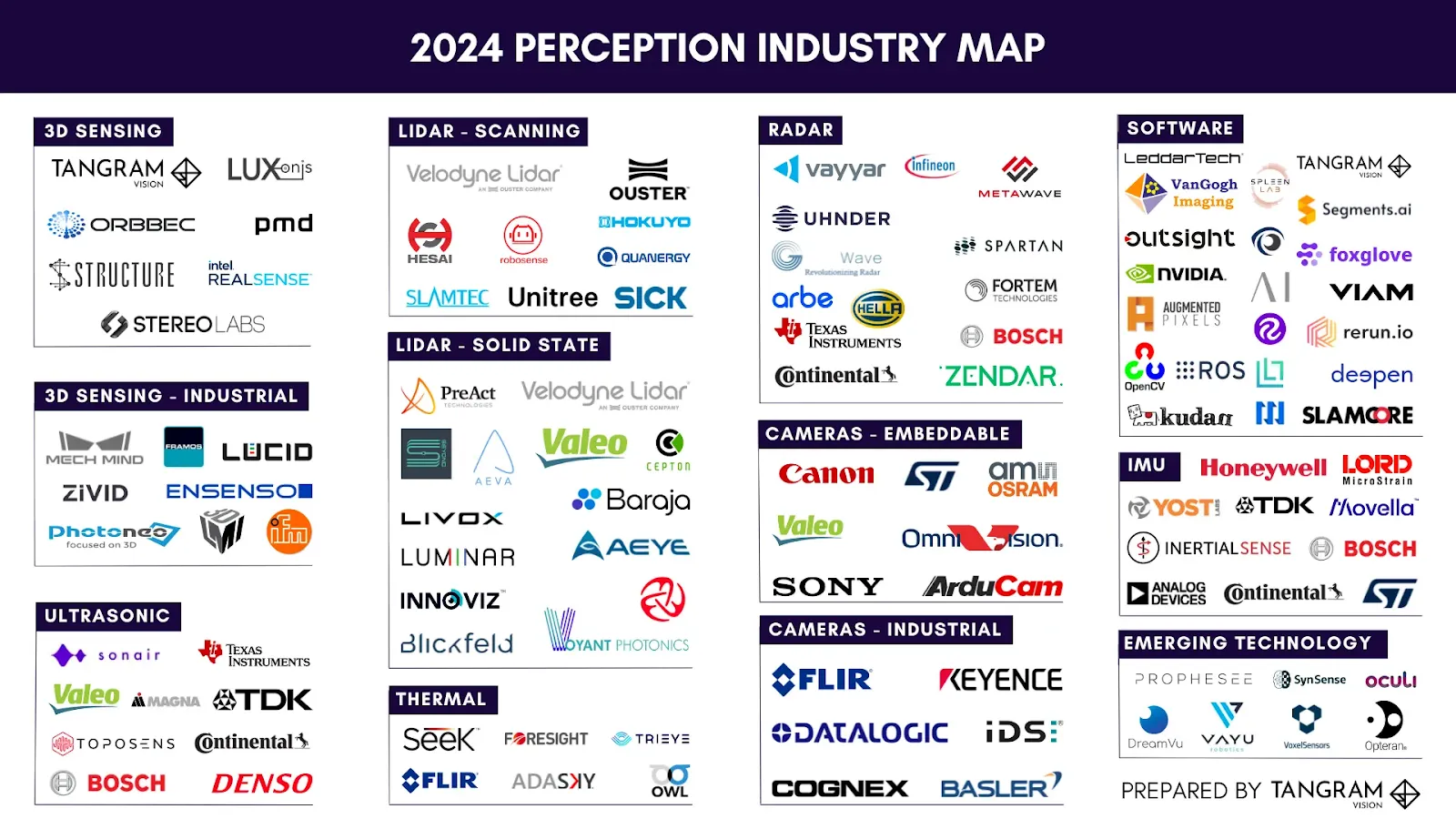
- Perception: High-resolution 3D vision, LiDAR, radar, ultrasonic, and thermal imaging are now commoditised at the hardware level, with multi-sensor fusion providing robust, all-weather situational awareness.
- Control Systems: Real-time operating systems, safety-certified controllers, and advanced trajectory planning algorithms enable robots to function reliably in unstructured environments.
- Actuation & Locomotion: Advances in servo motors, lightweight composites, and compliant actuators have expanded the range of possible morphologies, spanning from quadrupeds to dexterous humanoids.
But the gaps are equally clear:
- Energy systems: Batteries remain the hard ceiling. Most platforms are still constrained by low energy density, short cycle life, and heavy packs, which limit range, payload, and duty cycles.
- Tactile sensing: Unlike perception via vision, touch-based sensing is primitive. Few robots can reliably detect slip, grip force, or texture in a way comparable to human hands.
- Dexterous actuation: Despite progress, affordable actuators with human-like precision, compliance, and durability are still lacking. Soft robotics is promising but not yet industrial-grade.
- Integration & safety: Control systems remain siloed, and cross-stack integration (perception ↔ planning ↔ actuation) with real-time fail-safes is still immature.
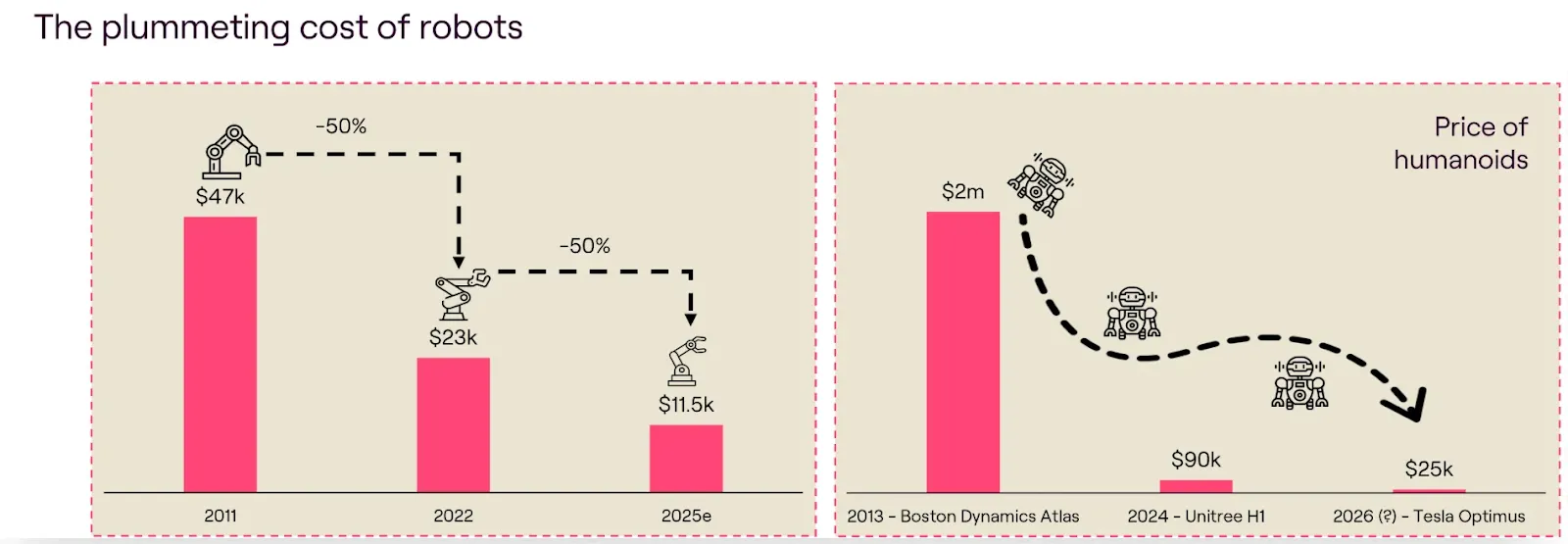
- Cost curves: While sensors have commoditised, high-performance actuators, batteries, and compliant materials remain expensive, slowing adoption outside well-capitalised industries.
These gaps explain why so much of today’s industry remains verticalized: each application builds its own partial stack rather than relying on shared primitives. The next leap will not come from incremental improvements in sensors or actuators, but from generalist models and platforms that cut across these divides. Crucially, these models unify the software stack while also creating pressure for new classes of hardware inventions (better actuators, tactile skins, lighter batteries) that were previously unprioritized. In this sense, advances in world models and platforms are as much about reshaping the hardware agenda as the software one.
Application Landscape & Segmentation
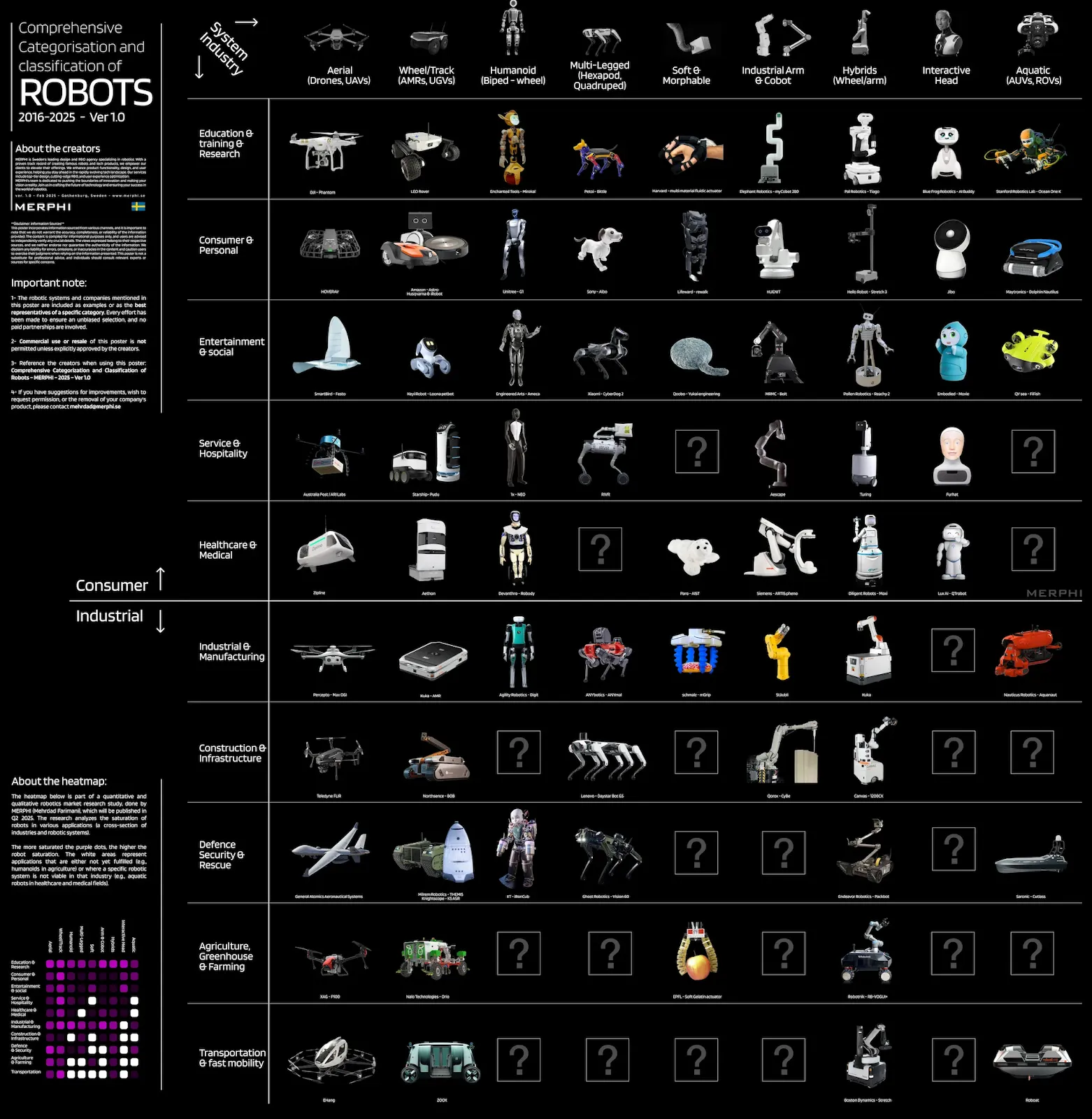
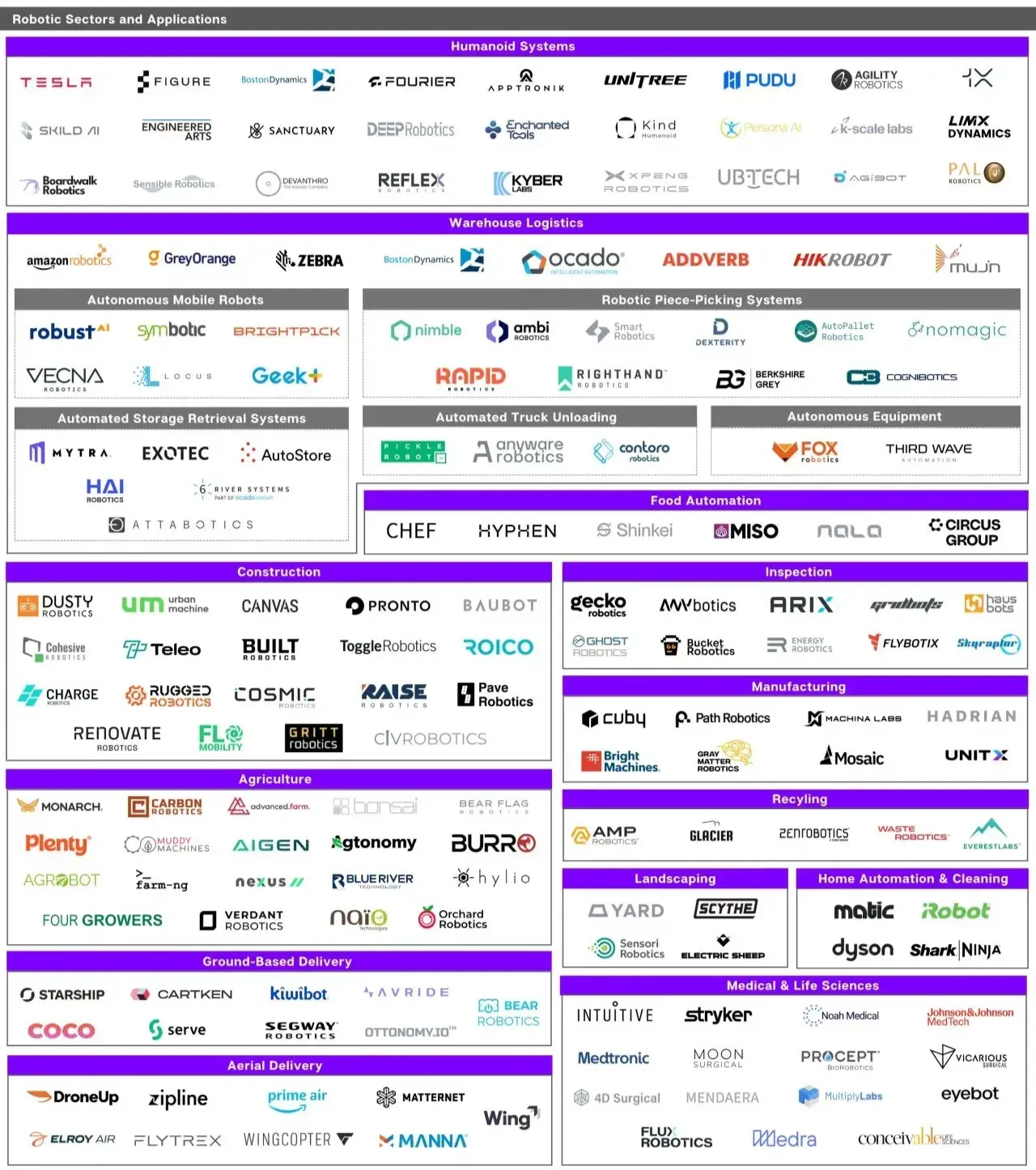
The robotics industry today is a mosaic of specialised verticals, each with its own unit economics, adoption timeline, and scaling constraints:
- Humanoids → Versatile platforms designed for human-centric environments.
- Warehouse Logistics → Autonomous mobile robots (AMRs), robotic picking systems, and automated storage/retrieval systems.
- Agriculture → Autonomous tractors, robotic harvesters, and precision spraying drones.
- Construction → Autonomous earthmoving, bricklaying, and inspection systems.
- Manufacturing → Flexible assembly robots, collaborative robots (cobots) for small and mid-sized factories, and automated quality-assurance systems.
- Medical & Life Sciences → Surgical robotics, lab automation, rehabilitation exoskeletons.
- Delivery & Mobility → Ground-based delivery robots and autonomous aerial cargo drones.
The LWM & Embodied AI Revolution
The scaling laws that transformed large language models (LLMs), where more data, compute, and model parameters led to step changes in capability, are now beginning to play out in robotics through Large World Models (LWMs). These are foundation models trained to simulate rich, interactive environments with physics, objects, agents, and the consequences of actions. The ambition: create limitless, controllable virtual worlds to train and evaluate embodied AI before real-world deployment safely.
LWMs are not the entire stack, however. They primarily influence training and evaluation, offering an infinite curriculum of simulated worlds where robots can practice navigation, manipulation, and multi-step reasoning before entering reality. However, achieving general-purpose robotics still requires progress across perception (interpreting complex sensory inputs), task planning (sequencing actions toward goals), and action generation/control (turning intent into reliable motor commands). LWMs accelerate this pipeline, but they must be tightly coupled with advances in these other domains to deliver true embodied intelligence.
Two recent systems illustrate this momentum:
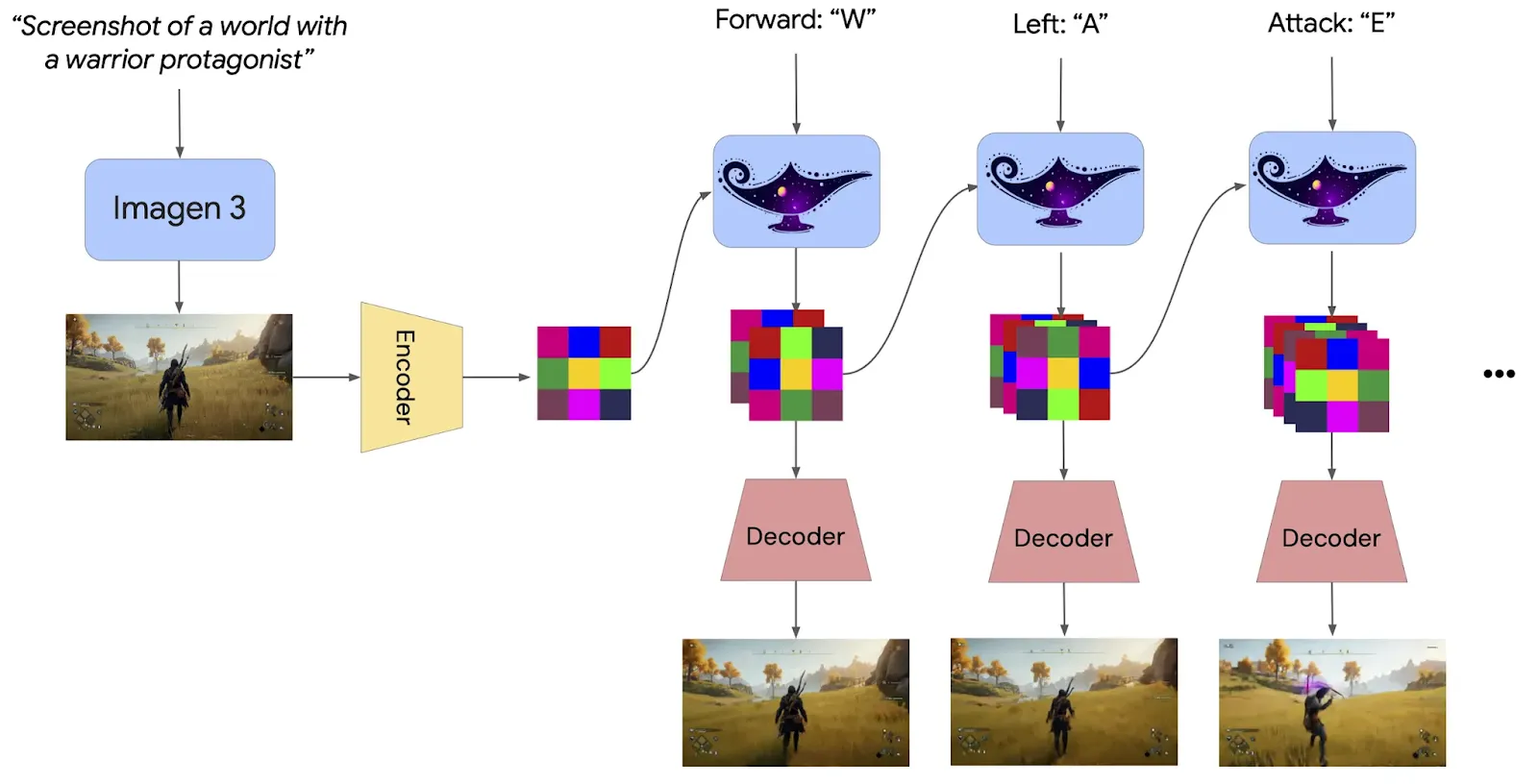
- Genie 2 (Google DeepMind): From a single image prompt, Genie 2 generates a coherent, interactive 3D world and responds appropriately to user or agent actions (e.g., “move forward,” “pick up object,” “open door”). It models complex character animation, object affordances, multi-agent interactions, and environmental physics such as water, gravity, lighting, and reflections, all learned from large-scale video datasets. This enables both humans and AI agents to step into imagined environments and interact with them as if they were real.
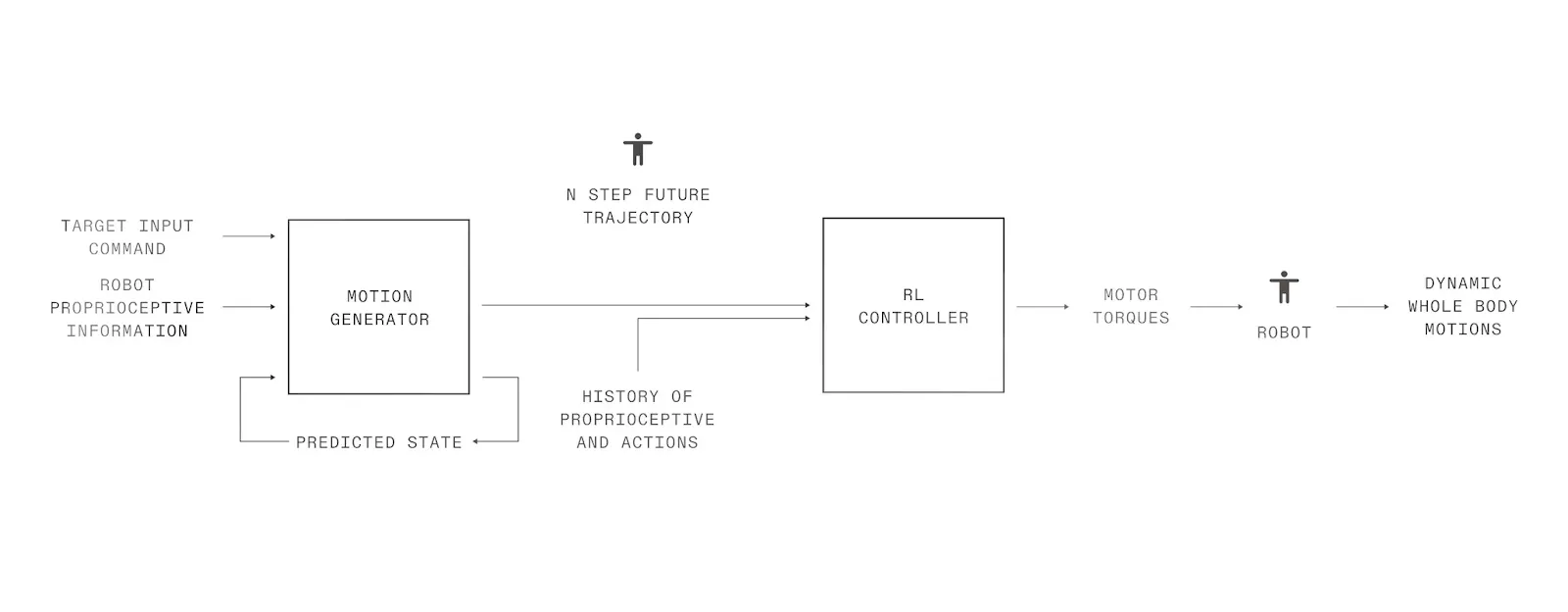
- 1X World Model (1X Technologies): Trained on thousands of hours of humanoid robots (EVE) performing diverse mobile manipulation tasks in homes and offices, this model acts as a learned simulator directly from raw sensor data. It can imagine multiple futures from the same initial conditions, simulate long-horizon tasks like folding laundry, and predict the effects of different action proposals (e.g., grasping one box versus another). Crucially, it also supports evaluation at scale. Instead of costly real-world trials, policies can be tested across millions of simulated scenarios, measuring performance drift over time, a prerequisite for establishing scaling laws in robotics.
Why this matters?
These systems represent a shift from narrow, manually authored simulations toward data-driven, physics-aware, and action-controllable virtual environments.
In robotics, this is a breakthrough for three key reasons:
1. Infinite Training Curriculum
Traditional robot training requires expensive, slow, and risky real-world trials. LWM-based systems like Genie 2 and 1X can generate diverse environments on demand, enabling robots to learn navigation, manipulation, and planning in simulation, then transfer those skills to reality. They can model counterfactuals, explore “what if” scenarios, and maintain long-horizon memory, critical for multi-step tasks.
2. Shorter Hardware–Software Cycles
Robotics suffers from a mismatch between slow hardware iteration and fast software iteration. By front-loading training in these simulated environments, robots can arrive in the real world with mature policies, reducing costly redesigns.
3. Toward Generalist Embodied AI
Today’s robots tend to specialise. They’re either agile movers or dexterous manipulators, rarely both. Scaled-up world models promise a training ground for more generalist agents that can fluidly switch between cognitive skills and physical skills, instead of being confined to a single domain.
The Strategic Implication
Just as LLMs exploded in capability once scaling laws were proven, LWMs are approaching their own inflection point. They will require:
- Massive datasets from real robots operating in diverse geographies.
- Affordable, high-quality hardware fleets for continuous data capture.
- Compute and model expertise to train and maintain the simulations.
China, with its dense robotics deployment and manufacturing muscle, is aggressively moving to secure this position. The US leads in foundational model research, but struggles to convert it into large-scale embodied deployments.
India’s opportunity lies in positioning itself as the hub of hardware, environmental diversity, and cost-efficiency for LWMs:
- Hardware: Leverage emerging electronics and robotics manufacturing policy to mass-produce affordable robot platforms.
- Data: Use India’s diverse industrial, urban, and rural landscapes to collect rich real-world datasets that global LWMs need to generalise.
- Software: Pair this with India’s proven software and AI talent to integrate perception, planning, and control within LWM-powered training pipelines.
By strategically aligning manufacturing, AI, and robotics policy, India can secure a place at the core of the LWM value chain, providing the environments and platforms that train the next generation of general-purpose robots.
Path to General-Purpose Robots
The road to general-purpose robotics is not purely about AI – it’s a full-stack challenge:
1. Hardware Readiness: Develop modular, low-cost actuators and swappable end-effectors, and achieve battery packs with 2–3× the current energy density.
2. Data Acquisition at Scale: Employ self-play in simulation, fleet learning, and cross-domain data aggregation to reduce overfitting.
3. Model Generalisation: LWMs that can adapt from warehouse navigation to household manipulation without retraining from scratch.
4. Ecosystem Enablement: Integration of cloud robotics, edge AI accelerators, and standardised APIs to allow plug-and-play skills.
Signals from Indiaʼs Builders
India’s robotics ecosystem is still young, but a handful of teams are already pushing into frontier territory. Rather than just vertical automation, these players hint at what the next primitives could look like:
- CynLr: Vision-guided robotic arms tackling universal object handling, positioning vision as the missing primitive for general-purpose manipulation.
- Perceptyne: Building a dexterous AI robotics stack, i.e, manipulators + control, aimed at human-level dexterity across industrial and service contexts.
- Antropi Robotics: Demonstrating a “factory that never sleeps” via AI-orchestrated robotic arms that autonomously tend CNC machines, ensuring continuous and safe production.
- Genrobotics: Proving robotics as public infrastructure with Bandicoot, a scalable sewer-cleaning system tackling high-risk manual labour.
- Ati Motors: Developing heavy-industry AMRs that replace tuggers in automotive and manufacturing, signalling a path to autonomy in extreme-duty environments.
- Unbox Robotics: Transitioning from compact parcel sorters to a full-stack warehouse automation platform, with modular AMRs and robotic picking systems spanning inbound, storage, and outbound flows.
The Next Primitives: Frontier Problems Worth Solving
For robotics to move from narrow applications to frontier contributions, there are still open problems globally. Founders tackling these will immediately stand out:
- Structured, diverse datasets: Crowded urban navigation, multilingual signage, informal labour workflows, and rural/agricultural settings are under-represented in global robotics datasets. Capturing and curating these environments is a massive opportunity to shape the global LWM frontier.
- Low-cost, modular humanoids & manipulators: We have many mobile robots and other vertical-specific machines, but no widely available home-grown general-purpose robot platform. A modular system that supports LWM training loops would be globally valuable.
- Materials innovation: Actuators, soft robotics, and sensorized “skin-like” materials that mimic human touch could unlock entirely new modalities of perception, dexterity, and safe human-robot interaction.
- Battery & actuation breakthroughs: Limited battery energy density and high actuator costs remain hard limits on deployment economics. These fundamental bottlenecks are still unsolved.
- Evaluation at scale: Simulation and fleet learning infrastructure (like 1X and DeepMind are building) is missing almost everywhere. Founders who build this pipeline will control the data-to-deployment loop.
World models are not just valuable as research artefacts. Their real power lies in how we use them to expand the robotics horizon. By lowering the bar for training, experimentation, and deployment, they allow new classes of builders to enter the field. This matters especially in markets like India, where automation comes at a steep cost. If LWMs can reduce that cost curve, they become accelerants for industrialisation itself, enabling India (and other emerging economies) to leapfrog traditional adoption timelines and industrialise better and faster.
Today, robotics founders can choose from a rich toolbox of perception stacks, control software, and pre-trained world models. What’s missing is the next set of primitives that will define credibility and differentiation at the frontier.
If you’re working on any of these hard problems, from data and materials to modular platforms or evaluation infrastructure – we’d love to talk. The next decade in robotics won’t be won by whoever ships the most individual robots, but by whoever solves the foundational problems that make general-purpose robotics a reality.
DISCLAIMER
The views expressed herein are those of the author as of the publication date and are subject to change without notice. Neither the author nor any of the entities under the 3one4 Capital Group have any obligation to update the content. This publications are for informational and educational purposes only and should not be construed as providing any advisory service (including financial, regulatory, or legal). It does not constitute an offer to sell or a solicitation to buy any securities or related financial instruments in any jurisdiction. Readers should perform their own due diligence and consult with relevant advisors before taking any decisions. Any reliance on the information herein is at the reader's own risk, and 3one4 Capital Group assumes no liability for any such reliance.Certain information is based on third-party sources believed to be reliable, but neither the author nor 3one4 Capital Group guarantees its accuracy, recency or completeness. There has been no independent verification of such information or the assumptions on which such information is based, unless expressly mentioned otherwise. References to specific companies, securities, or investment strategies are not endorsements. Unauthorized reproduction, distribution, or use of this document, in whole or in part, is prohibited without prior written consent from the author and/or the 3one4 Capital Group.
.jpg)
-p-500.webp)
.jpg)







